In-silico development and assessment of a Kalman filter motor decoder for prosthetic hand control
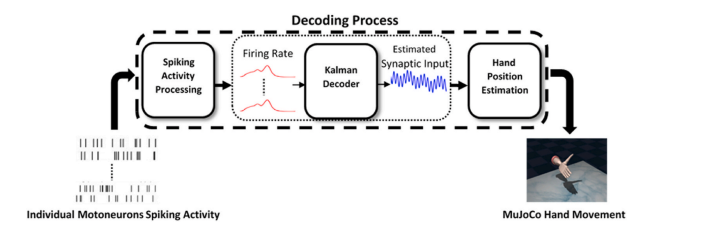
Up to 50% of amputees abandon their prostheses, partly due to rapid degradation of the control systems, which require frequent recalibration. The goal of this study was to develop a Kalman filter-based approach to decoding motoneuron activity to identify movement kinematics and thereby provide stable, long-term, accurate, real-time decoding. The Kalman filter-based decoder was examined via biologically varied datasets generated from a high-fidelity computational model of the spinal motoneuron pool. The estimated movement kinematics controlled a simulated MuJoCo prosthetic hand. This clear-box approach showed successful estimation of hand movements under eight varied physiological conditions with no retraining. The mean correlation coefficient of 0.98 and mean normalized root mean square error of 0.06 over these eight datasets provide proof of concept that this decoder would improve long-term integrity of performance while performing new, untrained movements. Additionally, the decoder operated in real-time (~0.3 ms). Further results include robust performance of the Kalman filter when re-trained to more severe post-amputation limitations in the type and number of motoneurons remaining. An additional analysis shows that the decoder achieves better accuracy when using the firing of individual motoneurons as input, compared to using aggregate pool firing. Moreover, the decoder demonstrated robustness to noise affecting both the trained decoder parameters and the decoded motoneuron activity. These results demonstrate the utility of a proof of concept Kalman filter decoder that can support prosthetics’ control systems to maintain accurate and stable real-time movement performance. © 2021 Elsevier Ltd