
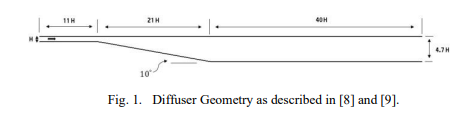
Comparative Study for Different URANS Models for Capturing Flow Separation Inside a Plane Diffuser
A comparative numerical study is performed among different URANS turbulence models investigating the ability of the models to capture the deformation of the boundary layer near the separation zone. The results are validated against previously published numerical works (URANS, LES, DNS) and experimental works. The comparison included grid resolution, the pressure distribution, and the velocity profiles at the inclined wall, then the streamlines plot of each model is used to properly estimate the separation and reattachment points. © 2021 IEEE.
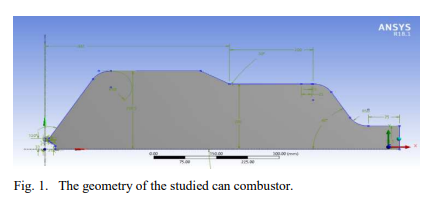
The Effect of Different Design and Operational Parameters on the Performance of Can-Type Combustors
Numerical simulation of the non-premixed combustion of methane air mixture in a gas turbine can- type swirl combustor is conducted. The study objective is to examine the effect of different design and operational parameters on the combustor performance and its emissions. The investigated parameters are the primary air flow rate, the swirl ratio between the secondary and the primary air and the fuel to the primary air swirl ratio. Several indicators are used to evaluate the combustion performance and emissions which include average exit temperature of the chamber, pattern factor, NOx and CO
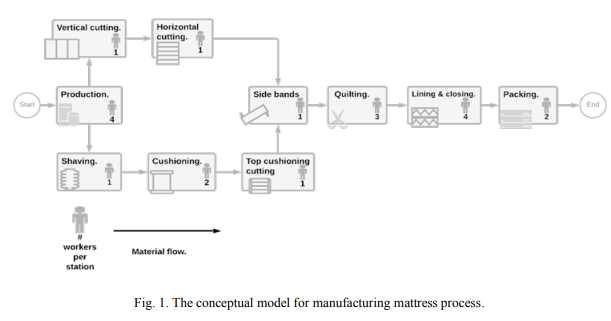
Decision Support Using Simulation to Improve Productivity: A Case Study
The use of modeling and simulation as a decision aid tool has been widely recognized in the field of production engineering. In this work, modeling and simulation is used to examine, analyze, and recommend improvements for the performance of an existing assembly line within a manufacturing facility. Several key performance indicators (KPIs) are determined to evaluate the performance of the assembly line under study. With the aid of Maynard Operation Sequence Technique (MOST) and Line Balancing methods, two improved systems are recommended to enhance the performance of the line under study
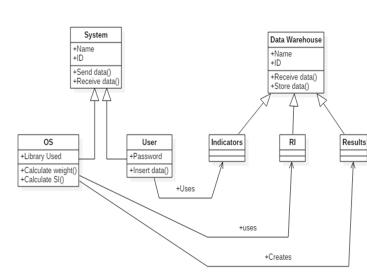
Decision making to calculate economic sustainability index: A case study
This work assesses the economic sustainability of industrial factories in Egypt based on the Analytical Hierarchical Process (AHP). The authors designed an economic sustainability index calculator (ESIC) using Unified Modelling Language (UML) and implemented the software using Visual basic of Applications (VBA) tool to the code the program. UML was used for the system analysis and design only, giving an insight to the system architecture. The manual method of calculating the economic sustainability index is included in this research and verified by using the designed ESIC. The categories of
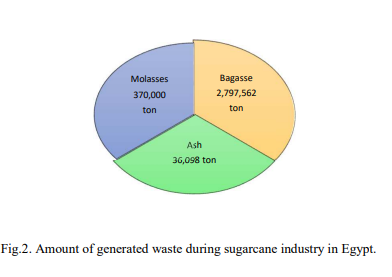
Production of Single-Use Tableware Products from Bagasse
This study aims to utilize bagasse waste produced from the sugar cane industry to manufacture single-use tableware such as plates and cups as a potential alternative to Styrofoam and plastic cups and containers. This will reduce the environmental hazardous results from packaging products. Unlike traditional plastics and Styrofoam which can take hundreds of years and require high temperature to degrade, these eco-friendly containers from bagasse take approximately 60 days to degrade and break down. In this research, potato peel starch and glycerol were added to bagasse pulp to improve both
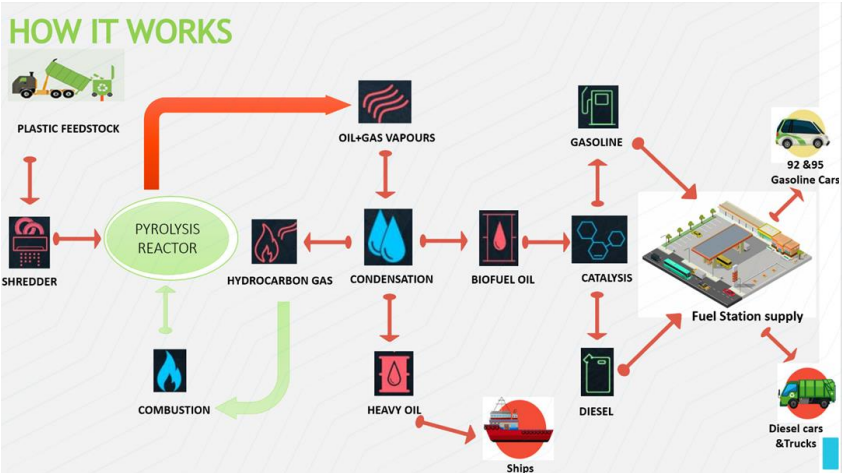
Production of fuel from plastic waste: A feasible business
This paper aims to conduct a feasibility study of producing fuel from plastic waste. It is a suggested approach to deal with the huge production of synthetic plastic around the world, so as to avoid its accumulation in landfills and the depletion of resources. Several types of research have addressed the conversion of plastic waste into energy, and in this study the authors focused on using pyrolysis to convert plastic to liquid oil. Accordingly, the volume of the waste was reduced significantly, and the produced liquid oil had a high calorific value in comparison to fossil fuel. The authors
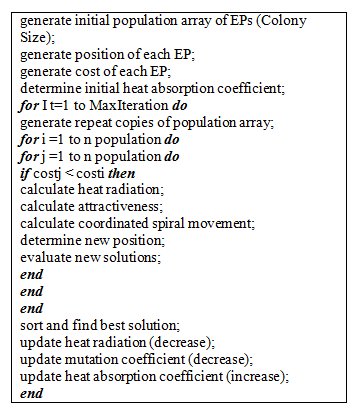
Two-modified emperor penguins colony optimization algorithms
Meta heuristic algorithms are very important methods, they used mainly in solving combinatorial optimization problems. They are stochastic in manner and simulate the behavior of any population of particles. Meta heuristics algorithms try to find optimal or near to optimal solution when solving complex optimization problem. In this paper two modified emperor penguins colony optimization algorithms MEPC1 and MEPC2 were developed. Original Emperor Penguins Colony (EPC) algorithm simulates the behavior of emperor of penguins, two modifications are done to the original EPC, Archimedes and
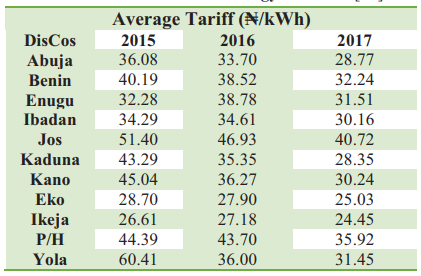
Electricity pricing in an emerging deregulated market: A Case of Nigeria and Egypt.
The globalization and rapid industrialization of any country is a function of availability of electricity in desired quality and quantity. Nigeria and Egypt are the most populated countries in West and North Africa respectively with incredible energy resources both renewable and non-renewable. Yet, the former is highly energy deficient when compared to the later. In recent time, the appropriate authorities have tried earnestly to reform the sector with the intent to improve the unpalatable situation through the liberalization of the vertically integrated structure of the power industries. In
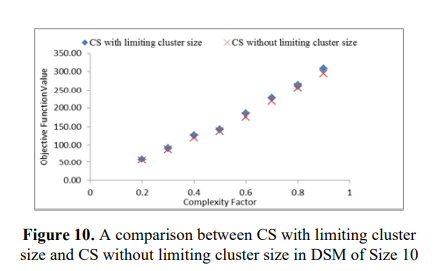
An efficient optimization algorithm for modular product design
Modularity concepts play an important role in the process of developing new complex products. Modularization involves dividing a product into a set of modules - each of which consisting of a set of components - that are interdependent in the same cluster and independent between clusters. During this process, a product can be represented using a Design Structure Matrix (DSM). A DSM acts as a tool for system analysis to provide clear visualization of product elements. In addition, DSM, shows the interactions between these product elements. This paper aims to propose an efficient optimization
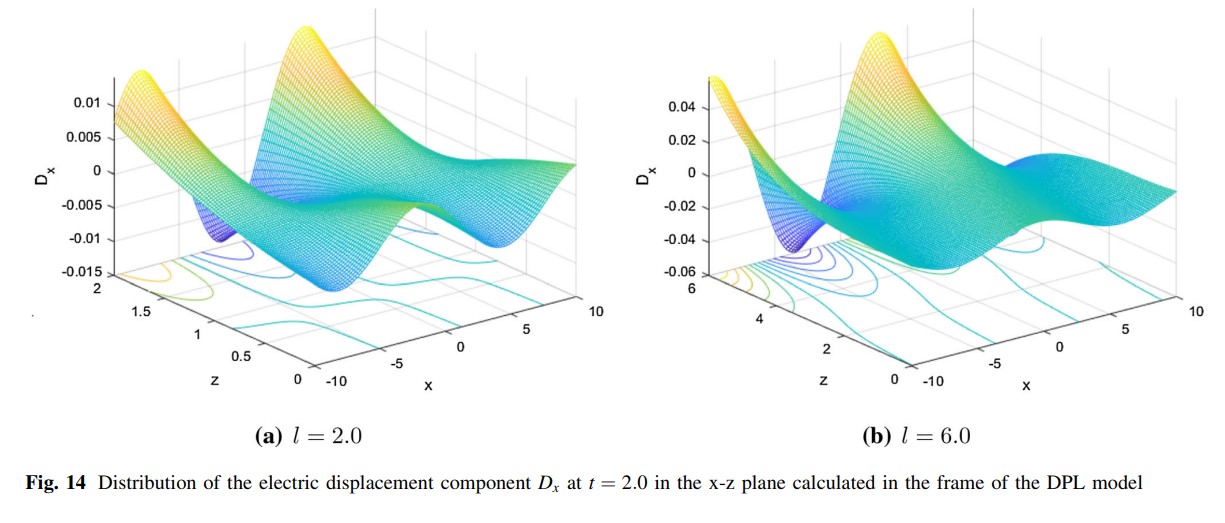
Piezothermoelasticity in an infinite slab within the dual-phase-lag model
The system of equations of the generalized piezothermoelasticity in anisotropic medium with dual-phase-lag model is established. The exact expressions for displacement components, the temperature, stress components, electric potential and electric displacements are given in the physical domain and illustrated graphically. These expressions are calculated numerically for the problem. Comparisons are made with the results predicted by Lord–Shulman theory and dual-phase-lag model. It is shown that the results from both theories are close to each other for thin slabs, while they differ