
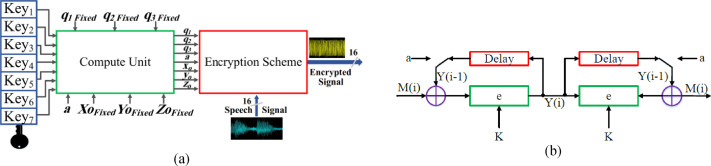
FPGA implementation of sound encryption system based on fractional-order chaotic systems
This paper introduces design and FPGA implementation of sound encryption system based on a fractional-order chaotic system. Also, it presents the FPGA implementation of Tang, Yalcin, and Özoǧuz fractional order chaotic systems. The Grunwald-Letnikov (GL) definition is used to generalize the investigated systems into the fractional-order domain. Also, the variation of parameters for each system is investigated against the window size of the GL definition. Xilinx ISE 14.5 is used to simulate the proposed design. Also, some hardware reduction techniques are applied to decrease hardware
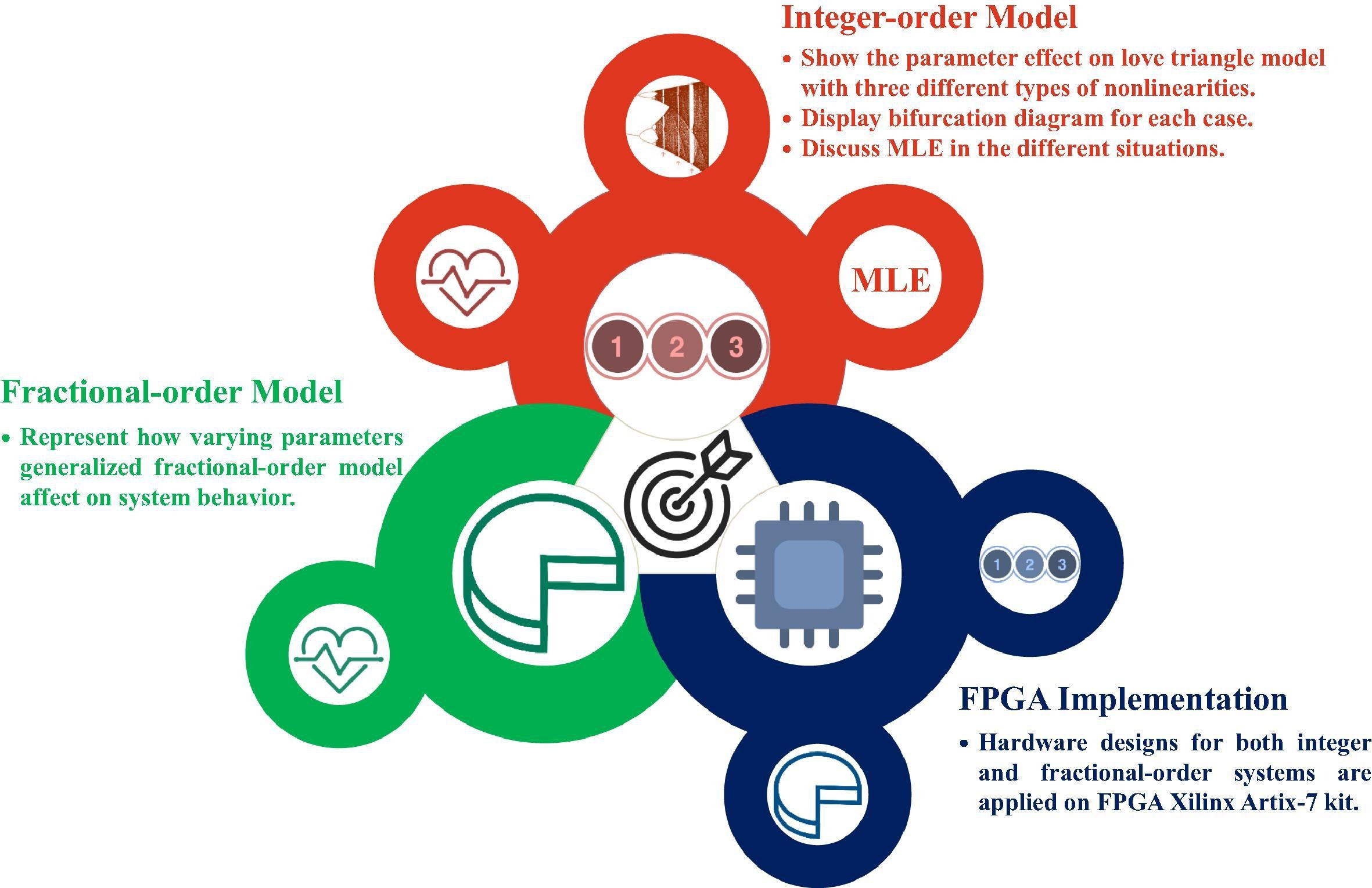
A study of the nonlinear dynamics of human behavior and its digital hardware implementation
This paper introduces an intensive discussion for the dynamical model of the love triangle in both integer and fractional-order domains. Three different types of nonlinearities soft, hard, and mixed between soft and hard, are used in this study. MATLAB numerical simulations for the different three categories are presented. Also, a discussion for how the kind of personalities affects the behavior of chaotic attractors is introduced. This paper suggests some explanations for the complex love relationships depending on the impact of memory (IoM) principle. Lyapunov exponents, Kaplan-Yorke
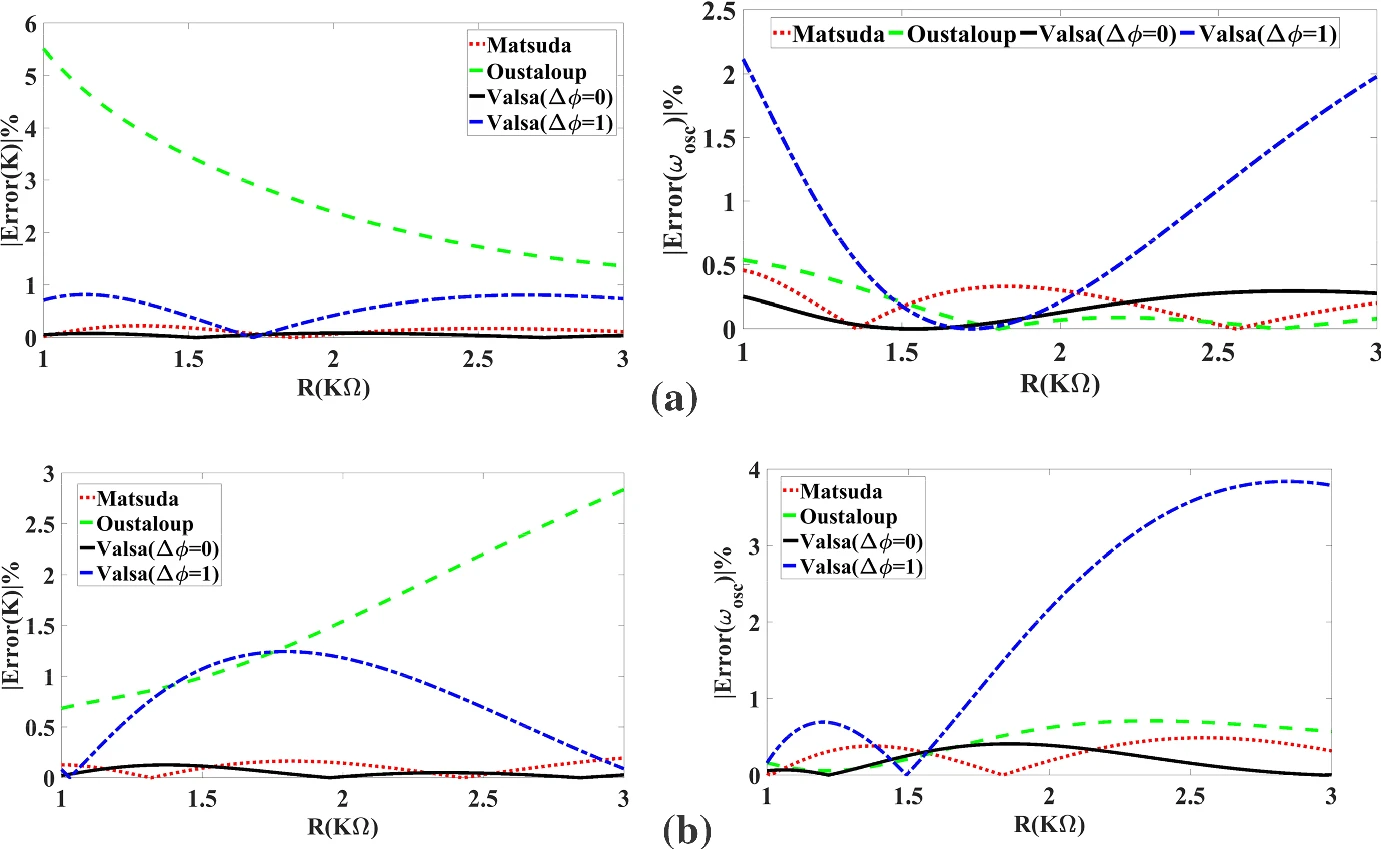
All Possible Topologies of the Fractional-Order Wien Oscillator Family Using Different Approximation Techniques
This paper introduces all the possible topologies of the Wien bridge oscillator family. This family has 72 topologies, 24 of them contain only RC or RL pairs, and the rest contain mixed pairs. The complete mathematical analysis of all twelve possible capacitive-based topologies is proposed in the fractional-order domain. The investigated circuits can be categorized into two groups, each with a similar characteristic equation. Three integer-order approximation techniques for the Laplacian operator sα are employed to solve and simulate the Wien bridge system. The studied approximations are those
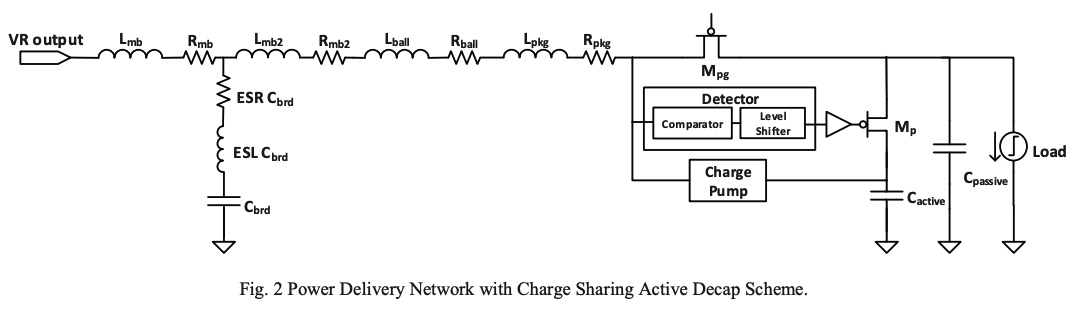
A fully integrated charge sharing active decap scheme for power supply noise suppression
Power supply noise has become a major challenge for proper operation of circuits with continuous scaling of CMOS technology along with supply voltage scaling. Conventional passive decoupling capacitors exhibit significant die area penalty resulting in a limited regulation effect. This paper presents a fully integrated charge-sharing-based active decap scheme for power supply noise suppression. The proposed idea is based on allocating a portion of the available passive decap to be used as an active decap that is charged up to a higher voltage and shares its boosted charge with the noisy rail
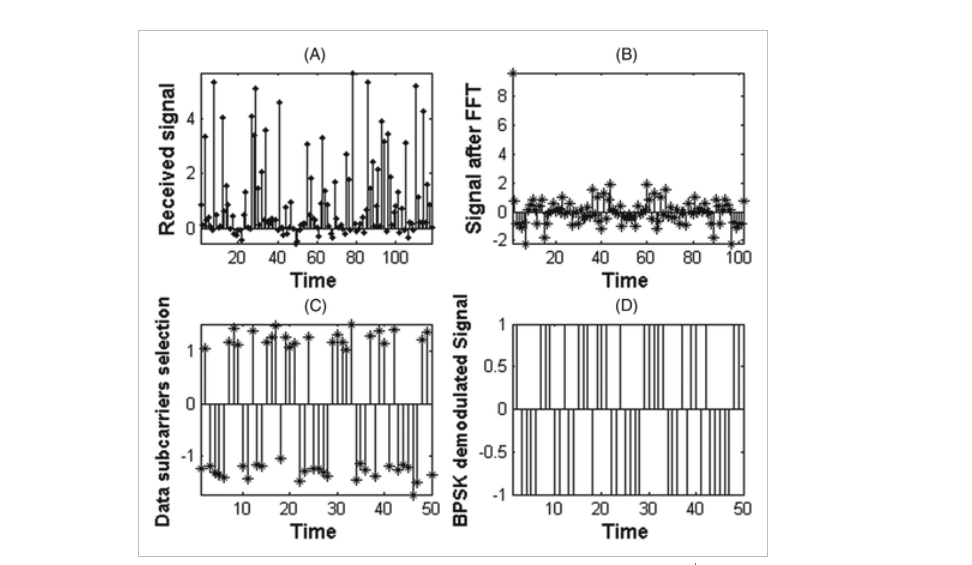
Odd clipping optical orthogonal frequency division multiplexing for VLC system
The Orthogonal Frequency Division Multiplexing (OFDM) has emerged as one of the promising techniques because of its robustness to multipath fading with high-speed data transmission. Classical bipolar OFDM cannot be used in intensity modulated with direct detection (IM/DD) optical communication systems, as visible light communication (VLC), so many optical modulation techniques as asymmetrical clipped optical OFDM (ACO-OFDM) and DC-Clipped OFDM (DCO-OFDM) have been investigated. In this paper, we introduce a novel optical modulation scheme that meets the optical communications requirements. The
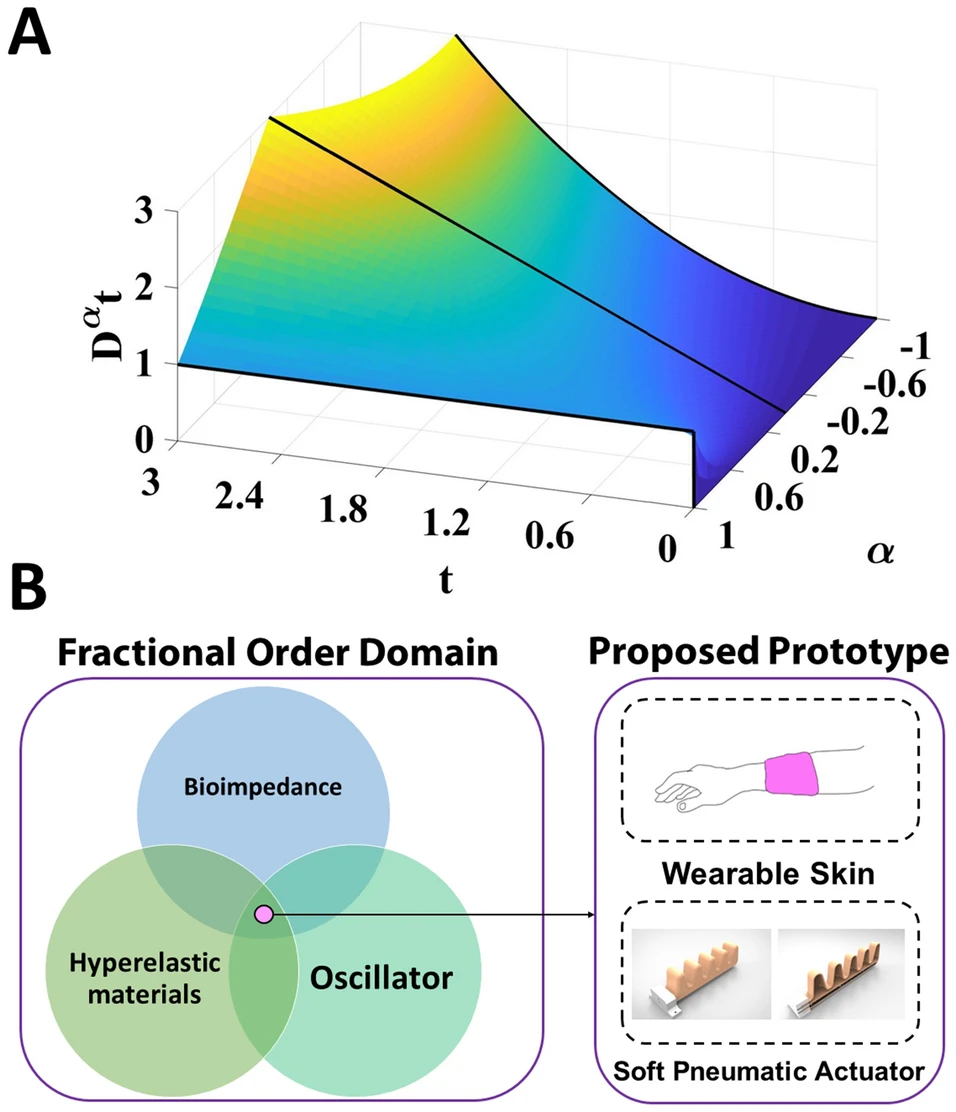
Tactile sensing biohybrid soft E-skin based on bioimpedance using aloe vera pulp tissues
Soft and flexible E-skin advances are a subset of soft robotics field where the soft morphology of human skin is mimicked. The number of prototypes that conformed the use of biological tissues within the structure of soft robots—to develop “Biohybrid Soft Robots”—has increased in the last decade. However, no research was conducted to realize Biohybrid E-skin. In this paper, a novel biohybrid E-skin that provides tactile sensing is developed. The biohybrid E-skin highly mimics the human skin softness and morphology and can sense forces as low as 0.01 newton. The tactile sensing feature is
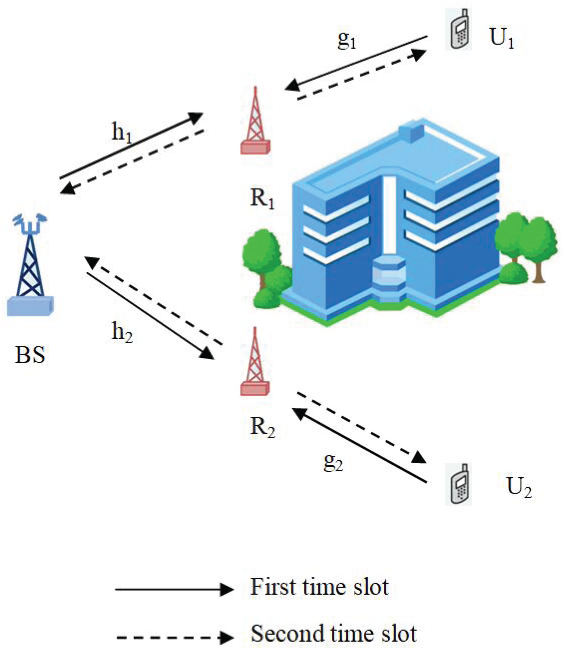
Joint power allocation and beamforming for multiuser MIMO two-way relay networks
In this paper, a multiuser cellular two-way relaying scenario is considered where multiple single-antenna mobile stations (MSs) and one multiple-antenna base station (BS) communicate, bidirectionally, via one half-duplex multiple-antenna relay station (RS). Furthermore, the case when the number of antennas at the RS is not sufficient to decode the individual messages is addressed. For this case, a two-phase two-way relaying scenario is considered. In the first phase, the multiple access, a minimum Mean Square Error (MSE) optimization problem is formulated which is found to be non-convex. Thus
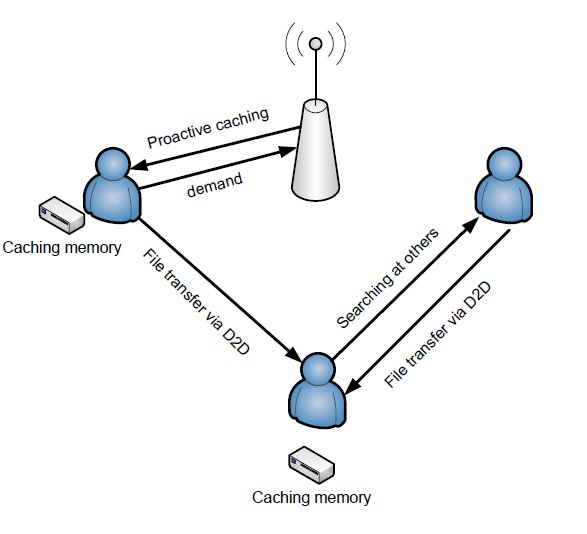
Content Delivery in Mobility-Aware D2D Caching Networks
The massive data exchange between base stations and network backhaul creates a strong overhead on mobile networks, especially at peak times. This motivates researchers to think about the proactive caching concept which depends mainly on caching some of the expected data items during off-peak times. The caching problem consists of two distinct phases, placement phase and delivery phase. In this work, we consider a mobility-aware device-to-device (D2D) caching network. We assume that data contents were already cached in users devices during the content placement phase and we focus on the content

Interference-based optimal power-efficient access scheme for cognitive radio networks
In this paper, we propose a new optimization-based access strategy of multi-packet reception (MPR) channel for multiple secondary users (SUs) accessing the primary user (PU) spectrum. We devise an analytical model that realizes the multi-packet access strategy of the SUs. All the network receiving nodes have MPR capability. We aim at maximizing the throughput of the individual SUs subject to the PU's queue stability. Moreover, we are interested in providing an energy-efficient cognitive scheme. Therefore, we include energy constraints on the PU and SU average transmitted energy to the

Towards Extended Bit Tracking for Scalable and Robust RFID Tag Identification Systems
The surge in demand for Internet of Things (IoT) systems and applications has motivated a paradigm shift in the development of viable radio frequency identification technology (RFID)-based solutions for ubiquitous real-Time monitoring and tracking. Bit tracking-based anti-collision algorithms have attracted considerable attention, recently, due to its positive impact on decreasing the identification time. We aim to extend bit tracking to work effectively over erroneous channels and scalable multi RFID readers systems. Towards this objective, we extend the bit tracking technique along two