

ANN-Python prediction model for the compressive strength of green concrete
Purpose: Utilization of sustainable materials is a global demand in the construction industry. Hence, this study aims to integrate waste management and artificial intelligence by developing an artificial neural network (ANN) model to predict the compressive strength of green concrete. The proposed model allows the use of recycled coarse aggregate (RCA), recycled fine aggregate (RFA) and fly ash (FA) as partial replacements of concrete constituents. Design/methodology/approach: The model is constructed, trained and validated using python through a set of experimental data collected from the
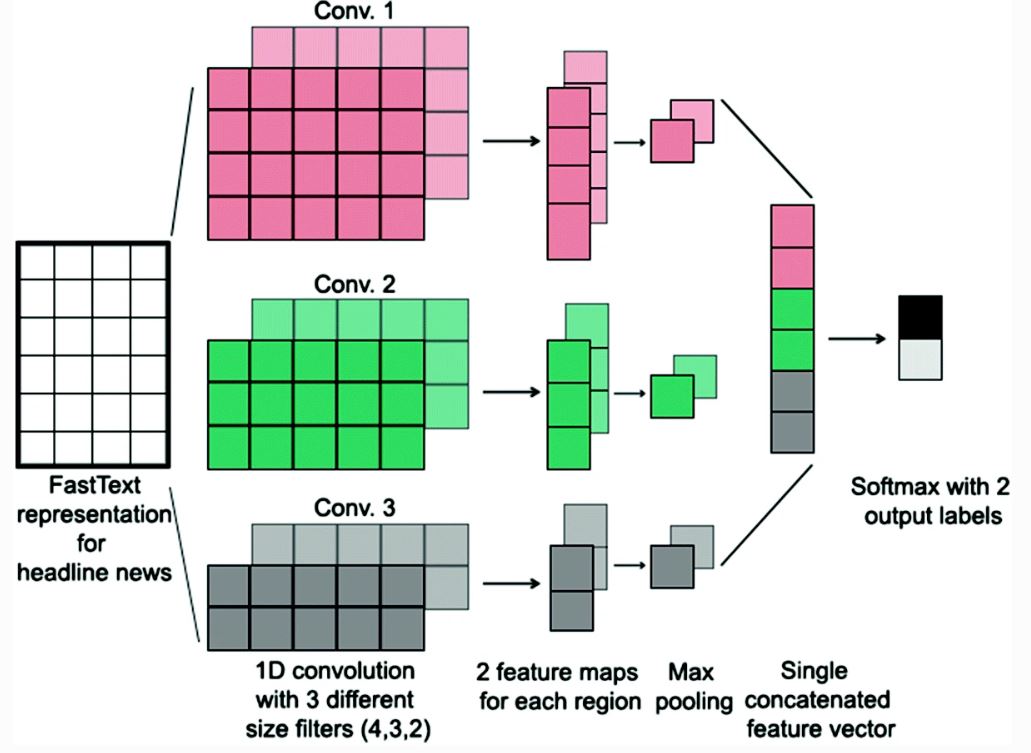
Evaluation of Different Sarcasm Detection Models for Arabic News Headlines
Being sarcastic is to say something and to mean something else. Detecting sarcasm is key for social media analysis to differentiate between the two opposite polarities that an utterance may convey. Different techniques for detecting sarcasm are varying from rule-based models to Machine Learning and Deep Learning models. However, researchers tend to leverage Deep Learning in detecting sarcasm recently. On the other hand, the Arabic language has not witnessed much improvement in this research area. Bridging the gap in sarcasm detection of the Arabic language is the target behind this work. In
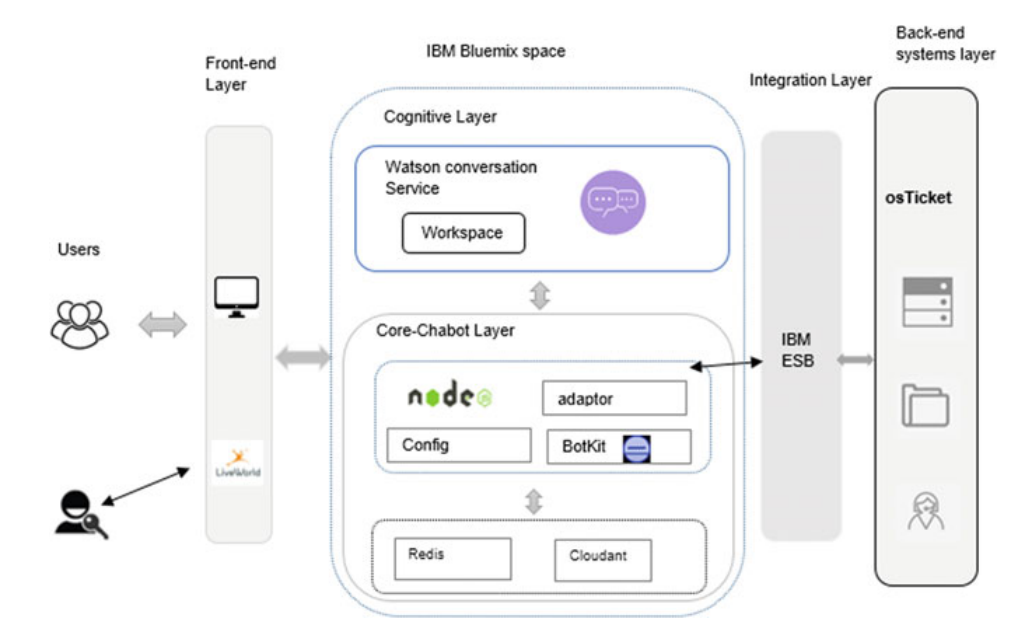
A study about using a cognitive agent in replacing level 1 and 2 service desk activities
The radical change in technology and high customer expectations and demand are pushing the service desk to provide a competent service for the customers. And this service should be faster, more flexible and gives a more accurate response and high user experience. Replacing the human call agent’s activities with a cognitive agent could improve the user experience by providing a faster response to customer’s requests, removing the human errors and giving 24/7 support with less operational cost. The cognitive agent has the potential to scale personalized and tailored interactions. And this will
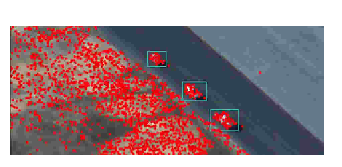
Tracking ground targets from a UAV using new P-N constraints
This paper presents improved automatic moving target detection and tracking framework that is suitable for UAV imagery. The framework is comprised of motion compensation phase to detect moving targets from a moving camera, target state estimation with Kalman filter, and overlap-rate-based data association. Finally, P-N learning is used to maintain target appearance by utilizing novel structural constraints to select positive and negative samples, where data association decisions are used as positive (P) constraints. After learning target appearance, a cascaded classifier is employed to detect
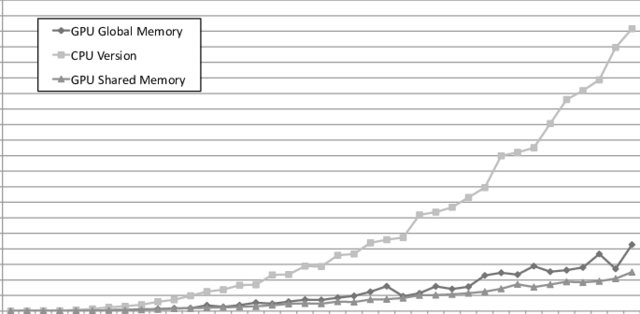
A GPU-enabled solver for time-constrained linear sum assignment problems
This paper deals with solving large instances of the Linear Sum Assignment Problems (LSAPs) under realtime constraints, using Graphical Processing Units (GPUs). The motivating scenario is an industrial application for P2P live streaming that is moderated by a central tracker that is periodically solving LSAP instances to optimize the connectivity of thousands of peers. However, our findings are generic enough to be applied in other contexts. Our main contribution is a parallel version of a heuristic algorithm called Deep Greedy Switching (DGS) on GPUs using the CUDA programming language. DGS
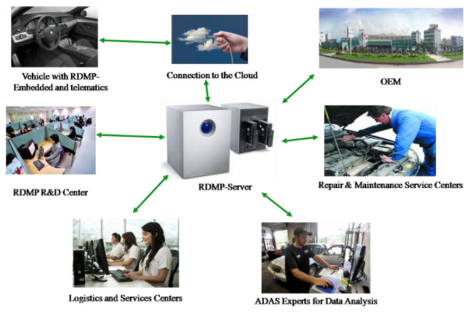
Remote Diagnosis, Maintenance and Prognosis for Advanced Driver Assistance Systems Using Machine Learning Algorithms
New challenges and complexities are continuously increasing in advanced driver assistance systems (ADAS) development (e.g. active safety, driver assistant and autonomous vehicle systems). Therefore, the health management of ADAS’ components needs special improvements. Since software contribution in ADAS’ development is increasing significantly, remote diagnosis and maintenance for ADAS become more important. Furthermore, it is highly recommended to predict the remaining useful life (RUL) for the prognosis of ADAS’ safety critical components; e.g. (Ultrasonic, Cameras, Radar, LIDAR). This paper
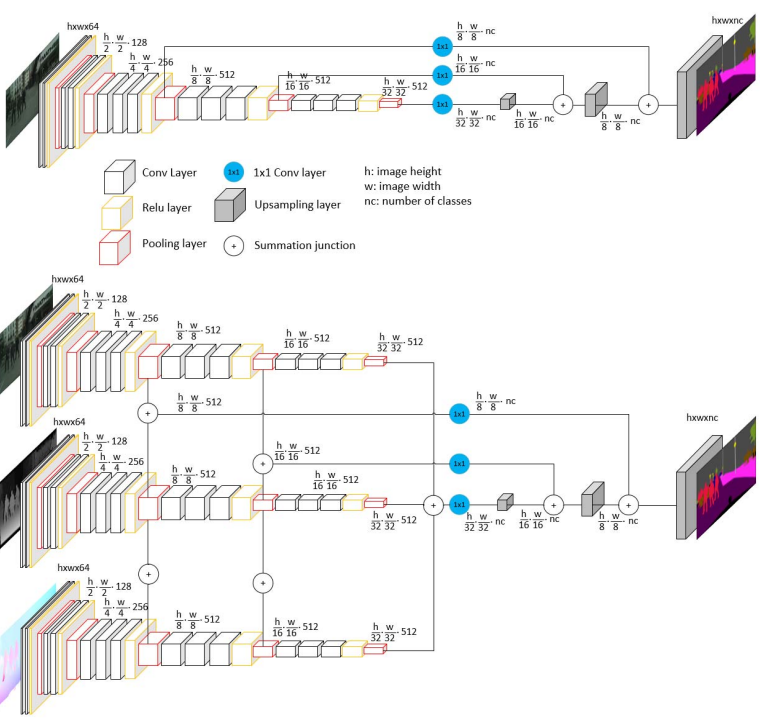
Motion and depth augmented semantic segmentation for autonomous navigation
Motion and depth provide critical information in autonomous driving and they are commonly used for generic object detection. In this paper, we leverage them for improving semantic segmentation. Depth cues can be useful for detecting road as it lies below the horizon line. There is also a strong structural similarity for different instances of different objects including buildings and trees. Motion cues are useful as the scene is highly dynamic with moving objects including vehicles and pedestrians. This work utilizes geometric information modelled by depth maps and motion cues represented by
A Secure Federated Learning Framework for 5G Networks
Federated learning (FL) has recently been proposed as an emerging paradigm to build machine learning models using distributed training datasets that are locally stored and maintained on different devices in 5G networks while providing privacy preservation for participants. In FL, the central aggregator accumulates local updates uploaded by participants to update a global model. However, there are two critical security threats: poisoning and membership inference attacks. These attacks may be carried out by malicious or unreliable participants, resulting in the construction failure of global
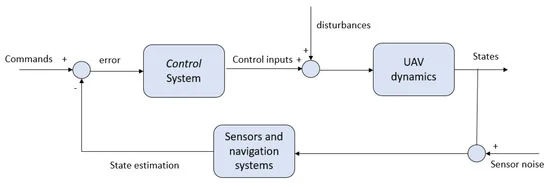
A detailed survey and future directions of unmanned aerial vehicles (Uavs) with potential applications
Recently, unmanned aerial vehicles (UAVs), also known as drones, have gained widespread interest in civilian and military applications, which has led to the development of novel UAVs that can perform various operations. UAVs are aircraft that can fly without the need of a human pilot onboard, meaning they can fly either autonomously or be remotely piloted. They can be equipped with multiple sensors, including cameras, inertial measurement units (IMUs), LiDAR, and GPS, to collect and transmit data in real time. Due to the demand for UAVs in various applications such as precision agriculture
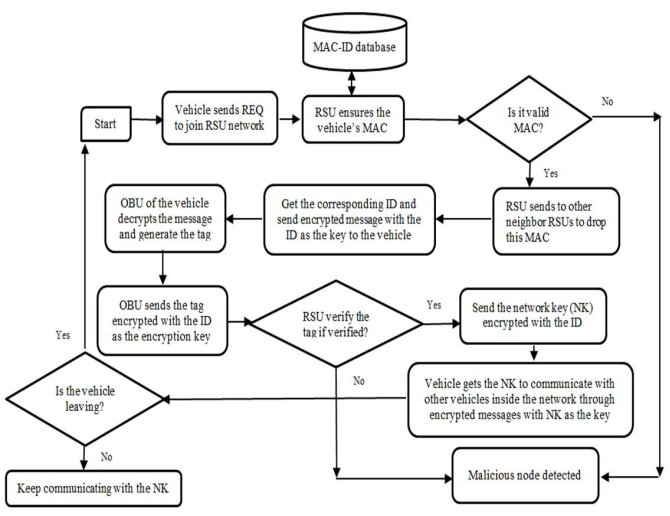
Sybil attack prevention through identity symmetric scheme in vehicular ad-hoc networks
Vehicular Ad-hoc Networks (VANETs) are a subset of Mobile Ad-hoc Networks (MANETs). They are deployed to introduce the ability of inter-communication among vehicles in order to guarantee safety and provide services for people while driving. VANETs are exposed to many types of attacks like denial of service, spoofing, ID disclosure and Sybil attacks. In this paper, a novel lightweight approach for preventing Sybil attack in VANETs is proposed. The presented protocol scheme uses symmetric key encryption and authentication between Road Side Units (RSUs) and vehicles on the road so that no