Fractional Order Two Degree of Freedom PID Controller for a Robotic Manipulator with a Fuzzy Type-2 Compensator
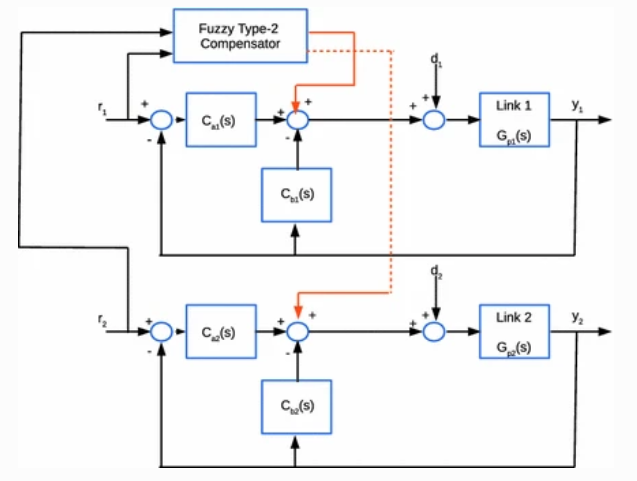
In this paper a novel strategy for the position control and trajectory tracking of robotic manipulators is proposed. This strategy consists of an independent two degree of freedom PID controller for a two links robotic arm. Due to the capability of two degree of freedom PID controllers to deal with disturbances, each link is controlled independently considering that the disturbance does not affect the system performance due to the robustness of the closed loop system. Then, a fuzzy type-2 centralized compensator is implemented to drive the orientation variables with the desired trajectory in order to improve the robustness and system performance. In this work, it is proved that the two degree of freedom fractional order PID controllers implemented with the fuzzy type-2 compensator improves the system performance in comparison with the results found in other studies, and one important issue is that the fuzzy type-2 system can be considered as a linear system emulating the capabilities of a linear compensator. To corroborate the theoretical results explained in this study, a numerical example is shown along with the respective discussion and conclusions. © Springer Nature Switzerland AG 2019.